
إعداد: م. هاني الأغواني
المُلّخص
في ظل التّوسع المُتسارع في دمج مصادر الطّاقة المُتجددة ضمن شبكات النّقل الكهربائية، بات من الضّروري تقييم تأثير ربط المزارع الرّيحية ذات المُولدات التّحريضية ثُنائية التّغذية (Doubly Fed Induction Generator) على الاستقرار العابر لمنظومة القدرة الكهربائية، وذلك لضمان الموثوقية عند نقل الطّاقة النّظيفة المُنتجة، وذلك من خلال الزّيادة التّدريجية للطّاقة المُولّدة بواسطة العنفات الرّيحية وتغيير مكان ربطها في النّظام، مع تحديد زمن الفصل الحرج (Critical Clearing Time) للمُولّدات التّزامنية المربوطة على تلك الشّبكة. أظهرت نتائج الدّراسة أن تأثير العنفات الرّيحية على السّلوك الدّيناميكي لنظام الطّاقة الكهربائية يختلف وفقاً للنّسبة المئوية لمساهمة تلك العنفات في السّعة الإجمالية للطّاقة المُولّدة، وكذلك باختلاف موقع مزرعة الرياح ضمن المُخطط الطّوبوغرافي للشّبكة الكهربائية. ففي بعض الحالات، يظهر تأثير العنفات الرّيحية بشكل إيجابي على زاوية الدّائر للمولدات التّزامنية وسرعتها وتوترات قضبان التّجميع.
- المُقدمة
أدّى ازدياد الاهتمام بالقضايا البيئية وتراجع مصادر الطّاقة التّقليدية إلى زيادة التّركيز على مصادر الطّاقة المُتجددة لتوليد الكهرباء. حيث تُشكّل بعض مصادر الطّاقة المُتجددة مُنافسة اقتصادية لأنظمة الطّاقة التقّليدية، ولاسيّما طاقة الرّياح، التي تُعد من أكثر المصادر الواعدة في هذا المجال. من أهم ما يُميّز هذا النّوع من التّوليد القدرة التّوليدية الأقل مقارنةً بالتّوليد التّقليدي، حيث يُعرّف معهد مهندسي الكهرباء والإلكترونيات (IEEE) مفهوم التّوليد المُوزع على أنه توليد كهربائي بواسطة وحدات أصغر من وحدات التّوليد المركزية، يمكن ربطها بأي نقطة في نظام الطّاقة الكهربائية. إن إضافة وربط العنفات الرّيحية إلى الشّبكات الكهربائية تتطلب من مُشغلي الشّبكة بذل جهود إضافية للحفاظ على استقرار النّظام ودمج هذه المصادر بالشكل الأمثل مع وحدات التّوليد التّقليدية. لذلك، تحتاج هكذا مجموعات إلى دراسة مُكثّفة وتخطيط مُسبق قبل الرّبط.
هناك مجموعة من المُشكلات عند ربط المزارع الرّيحية مع الشّبكة الكهربائية، تتمثل بعضها في عدم القدرة على التّنبؤ الدّقيق للطّاقة المُنتجة من العنفات الرّيحية، والذي يؤثر بدوره على مُحددات نظام الطّاقة، ولاسيّما المُحددات الدّيناميكية للاستقرار. لذلك، من المهم جداً دراسة وفهم العمليات الدّيناميكية للنّظام قبل ربط العنفات الرّيحية به وتكاملها مع أنواع أخرى من التّوليد، مثل محطات الطّاقة الحرارية والكهرومائية. تستخدم المزارع الرّيحية تقنيات توليد مُختلفة مقارنةً بمحطات الطّاقة التّقليدية، مثل المُولّدات التّحريضية، نظراً لمزايا هذه المُولّدات، كالتّحكم المُنفصل في الطّاقة الفعلية والطّاقة الردّية، فضلاً عن انخفاض استطاعة دوائر إلكترونيات القُدرة اللازمة لعمليات التّحويل المطلوبة. مع تطور إلكترونيات القُدرة مُؤخراً، أصبح استخدام المُولّد التّحريضي ثُنائي التّغذية مُنتشراً بشكلٍ ملحوظ.
إن تسليط الضّوء على مفهوم استقرار نظام الطّاقة يُعد حجر الأساس في فهم العمليات الدّيناميكية، فهو قدرة النّظام على العودة إلى حالة التّشغيل الطّبيعية بعد تعرضه لاضطراب ما. وبناءً عليه، يمكن تصنيف الاستقرار إلى ثلاث فئات رئيسة: استقرار الدّائر، واستقرار التّوتر، واستقرار التّردد. يُصنّف استقرار الدّائر بدوره إلى:
- استقرار الحالة الثّابتة (Steady State Stability): وهو قدرة المُولّدات على العودة إلى حالة التّزامن عند حدوث اضطرابات صغيرة وبطيئة، مثل التّغيرات التّدريجية في التّوليد أو الحمل. في هذه الحالة تكون المُولّدات مستقرة بشكل ثابت.
- الاستقرار العابر(Transient Stability): وهو قدرة المُولّدات على العودة إلى حالة التّزامن عند حدوث اضطرابات كبيرة ومُفاجئة، مثل حدوث عطل ثلاثي الأطوار أو انقطاع غير مُخطط له لأحد خطوط النّقل. في هذه الحالة تكون المُولّدات مستقرة بشكل عابر.
تُساعد دراسات الاستقرار على تحديد أمور بالغة في الأهمية، مثل زمن الفصل الحرج، وهو أقصى زمن يُمكن خلاله استمرار اضطراب ما دون أن يفقد النّظام استقراره، بهدف تحديد خصائص أنظمة الحماية التي يتطلبها نظام الطّاقة الكهربائية (المرجع السّابق).
تُضيف العنفات الرّيحية عطالة إضافية إلى النّظام، مما يؤثر بشكل مباشر على الاستقرار الدّيناميكي. من هنا يبرز الحافز وراء هذه الدّراسة والتي تقوم على:
- التّركيز على استخدام المُولّد التّحريضي ثُنائي التّغذية في توليد الطّاقة الرّيحية عند الرّبط مع الشّبكة الكهربائية.
- تأثير المُولّد التّحريضي ثُنائي التّغذية على الاستقرار العابر للمُولّدات التّزامنية بعد حدوث اضطراب ما كالعطل ثلاثي الأطوار.
- تحديد زمن الفصل الحرج للنّظام.
Sun, Tao (2004) Power Quality of Grid-Connected Wind Turbines with DFIG and Their Interaction with the Grid. Aalborg University, Denmark.
حمزة، علي , زيدان ، خالد (2007) كتاب تحليل نظم القدرة الكهربائية. منشورات جامعة دمشق.
- صياغة مشكلة البحث
2.1 المُولّد التّزامني
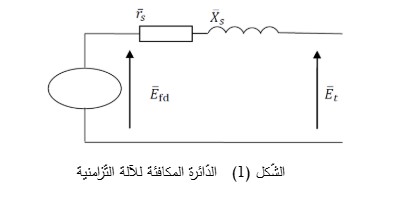
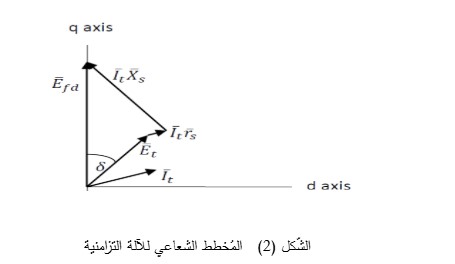
يُوضّح الشّكل (1) الدائرة المكافئة للآلة التّزامنية. كما تصف المُعادلة الآتية الآلة التّزامنية ذات الدّائر الأسطواني في الحالة المستقرة ويُوضّح الشّكل (2) المُخطط الشّعاعي لها. يمكن الاطّلاع على الّنموذج الرياضي الكامل لها في الحالة العابرة في المرجع الوارد على الهامش.
Et=-(rs+j Xs) It+jEfd (1)
Et : توتر الخرج، rs: المُقاومة الأومية للثابت
xs :المُفاعلة التزامنية
It : تيار الثابت
Efd: توتر التحريض
Larao, Anaya Olimpo, Jenkins, Nick, Ekanayake, Janaka, Cartwright, Phill, Hughes, Mike (2009) Wind Energy Generation Modelling and Control. John Wiley and Sons, Ltd, Publication, UK.
2.2 المُولّد التّحريضي ثُنائي التّغذية
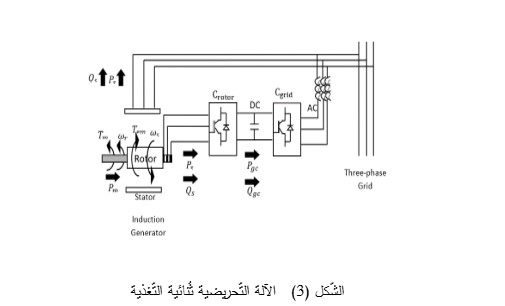
إنّ الآلة التّحريضية ثُنائية التّغذية في وضع المُولّد تكون نفسها المُولّد التّحريضي ذو الدّائر الملفوف ثلاثي الأطوار، حيث يتم توصيل ملفات الدّائر بثلاث حلقات انزلاق. يتم تغذية ملفات الدّائر في المُولّد التّحريضي بأنظمة جهد وتردد مُتغيرة ثلاثية الأطوار، وذلك عبر مُبدلات إلكترونية، والتي تكون موصولة عادةً بنفس الشّبكة الكهربائية المُتصلة بها ملفات الجزء الثّابت كما هو موضح في الشّكل (3). يُستخدم المُبدل الموصول مع جهة الشبكة لملفات الدائر للحفاظ على قيمة توتر ثابت في دارة التوتر المستمر (DC-Link)، بالإضافة إلى أنه يسمح بحقن أو سحب الاستطاعة الردّية. أما المُبدل من جهة العنفة الرّيحية فيستخدم بالتحكم بالاستطاعة الكهربائية المُولّدة من العنفة، حيث يتميز المُوّلد هنا بقدرته على العمل في نطاق سرعات يتراوح بين ±30%من السرعة التزامنية. هذا يتيح استخلاص أقصى طاقة ممكنة من الرياح حتى عند سرعات الرياح المنخفضة. إن أكثر ما يُستخدم من العناصر في المُبدلات الالكترونية هي العناصر الترانزستورية (IGBT) التي تُمكّن من تخفيض التوافقيات المحقونة في الشبكة، بالإضافة إلى التحكم المرن بالاستطاعة. يمكن لهذا المُولّد أن يعمل في كلتا الحالتين: فوق وتحت السّرعة التّزامنية ويكمن الاختلاف بين وضعي التّزامن في أن الطّاقة الكهربائية المُقدمة للشّبكة هي نفسها في كلتا الحالتين، مع العلم أنه في حالة التّشغيل تحت السّرعة التّزامنية، سيتم تغذية الدّائر من الشّبكة ويكون حقن الاستطاعة عبر الجزء الثّابت، ولكن في حالة التّشغيل فوق السّرعة التّزامنية، يكون حقن الاستطاعة في الشّبكة عبر الجزء الثّابت والدّائر معاً ولذلك سُمّي بالمُولّد ثُنائي التغذية (المرجع السّابق).
*سويدان، حسان (2013) تأثير العنفات الرّيحية ذات السّرعات الثابتة على الاستقرار العابر للمنظومة الكهربائية السّورية. مجلة جامعة دمشق للعلوم الهندسيّة، المجلد التاسع والعشرون، العدد الثاني. ص 325- 349.
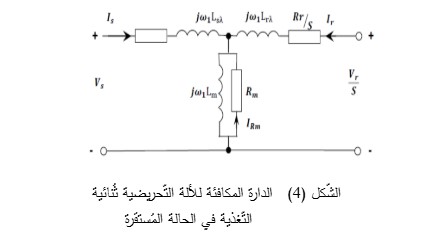
يوضح الشّكل (4) الدّارة المكافئة للمُولّد التّحريضي ثُنائي التّغذية في الحالة المستقرة. يمكن إيجاد النّموذج الرّياضي الكامل له في الحالة المستقرة والعابرة والنّموذج الرّياضي للمُحولة والنّموذج الرّياضي لخط النّقل بالتّفصيل في المرجع السّابق.
الاستقرار العابر
في دراسات الاستقرار العابر، ينصب الاهتمام على مقدار انحراف سرعة الدائر عن السّرعة الزّاويّة التّزامنية ωs. وبالتّالي، تُعطى معادلة التّأرجح الزّاويّ النّسبي (d2δ) /dt بدلالة الطّاقة الميكانيكية Pm التي توفرها العنفات، والطّاقة الكهربائية Pe وثابت العطالة H كما في (2) (حمزة، علي، زيدان، خالد (2007)).
Hπf0d2dt2= Pm(pu)– Pe(pu)=Pm–Pmaxsin (2)
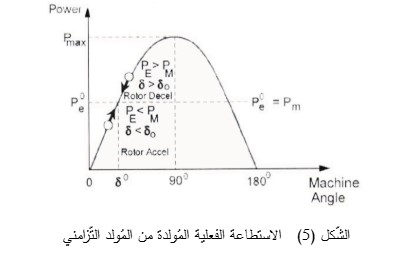
في المُولّد التّزامني، يتسارع الدّائر أثناء الاضطراب، عندما يكون العزم الميكانيكي أكبر من العزم الكهربائي. على العكس من ذلك، يتباطأ الدّائر عندما يكون العزم الميكانيكي أقل من العزم الكهربائي كما هو موضح في الشّكل (5) (المرجع السّابق). يتم توفير الاستطاعة الفعلية والاستطاعة الرّدّية التي يتم توليدها بواسطة منبع التّوتر كما تُظهر المُعادلات (3) و (4). تزداد كمية الاستطاعة الفعلية مع زيادة δ حتى 90 درجة، لتصل إلى القيمة القصوى. بالتّالي، يتم استخدام δ لتمثيل كل من التّأرجح الميكانيكي للدّائر وزاوية القوة المحركة الكهربائية E. في الممارسة العمليّة، للحفاظ على الاستقرار الديناميكي للنّظام الكهربائي، يجب أن تكون الزّاوية δ بحدود 20o*.

حيث:
V: توتر الشّبكة
X: المُفاعلة بين المولد والشّبكة
تتأثر استجابة النّظام بـالعلاقة غير الخطية بين زاوية الحمل δ وعزم الدّوران، وعادةً ما ينحصر مجال دراسة هذا النّوع من الاستقرار في الثّواني الأولى التي تلي الاضطراب. وبعد حل المعادلة التّفاضلية (2) وإجراء محاكاة للنّظام الكهربائي خلال فترة الدّراسة، يمكن رسم منحنيات زاوية الحمل δ(t) أو السّرعة النّسبيّة dδ/dt للحكم على استقرار النظام. بالإضافة إلى ذلك، يمكن رسم منحنيات تغير السرعة والتوتر مع الزمن (المرجع السابق).
يمكن صياغة معادلات النّظام مُتعدد المُولّدات بشكل مشابه لحالة المُولّد الواحد المُتصل بـقضيب تجميع لا نهائي. تُستخدم الافتراضات التّالية للتّبسيط (حمزة، علي، زيدان، خالد (2007)).
- يُمثّل كل مُولّد تزامني بمصدر توتر ثابت بشكل مباشر خلف المُفاعلة العابرة.
- تجاهل استجابة المُتحكم بالتّوتر وتكون الطّاقة الميكانيكية ثابتة تقريباً خلال فترة التّمثيل.
III. تحويل جميع الأحمال إلى سماحيات باستخدام توتر قضبان التّجميع قبل حدوث العطل.
- تجاهل التّخميد.
- زاوية كل مُولّد (زاوية الاستقرار) تساوي زاوية القوة المُحركة الكهربائية خلف ممانعة المُولّد.
- جميع مُولّدات المحطة الواحدة تتأرجح معاً.
إنّ الخطوة الأولى لتحليل الاستقرار العابر هي حل جريان الحمولة لتحديد توترات قضبان التّجميع وزواياها. يتم الحصول على التّوتر خلف المُفاعلة العابرة E` من التّالي:
Ei‘=Vi+j Xd ‘Ii (5)
حيث:
……2,1=i عدد المولدات
X`d: المُفاعلة العابرة على المحور المباشر d
I: تيار المولّد
ثم تحويل جميع الأحمال إلى سماحيات. نضيف عدد قضبان التّجميع m-buses إلى الشّبكة n-buses كما في الشّكل (6) لإدراج التّوتر خلف المُفاعلة العابرة. حيث:
n+1……. M توترات قضبان التّجميع خلف المُفاعلة العابرة.
يتم الحصول على مصفوفة توترات قضبان التّجميع (6) من خلال ما يلي:
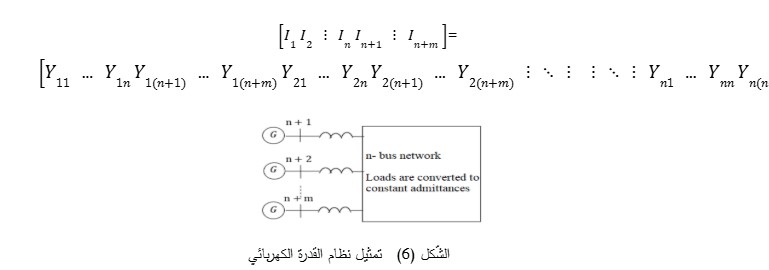
هذه المصفوفة تشبه مصفوفة السّماحية لجريان الحمولة، والفرق الوحيد هو أن مُفاعلة المُولّد والمُحوّل تدخل في هذه المصفوفة. بالإضافة إلى ذلك، يتم تعديل المكوّنات القطرية لتشمل سماحية الحمل. يتم حساب مصفوفة السّماحية لثلاث حالات قبل وأثناء وبعد حدوث العطل. في الخطوة الأخيرة، يتم حذف جميع العقد باستثناء عقد التّوليد ووضع عقد الحمل في السّطور العليا (حمزة، علي، زيدان، خالد (2007)). نحصل على الاستطاعة الفعلية المُولّدة Pe من خلال استخدام القيم القطبية لكلّ من التّوتر والسّماحية.
بناءً على الافتراضات المُبسطة، توجد معادلتان
تفاضليتان لكل مولّد (معادلة الحركة ومعادلة الاستطاعة) يمكن حلهما باستخدام طرق التّكامل العددي، مثل طريقة رونج-كوتا أو أويلر، وذلك للحصول على قيم زوايا الحمل والسّرعات الزّاويّة بدلالة الزّمن (حمزة، علي، زيدان، خالد (2007)). عند إزالة العطل يتم تحليل مُنحنيات زاوية الحمل والسّرعة الزّاويّة بدلالة الزّمن لتحديد ما إذا كان النّظام مستقراً أم لا. لأغراض التّحليل، يُستخدم عادةً مُولّد واحد كمرجع، ويُحسب فرق زاوية الحمل لكل مولّد آخر بالنّسبة لهذا المرجع. إذا لم تزداد فروق الزّوايا، فيمكن القول بأن النّظام مستقر، ولكن إذا زادت هذه الفروق، فهذا يشير إلى أن النّظام غير مستقر. من أجل الحفاظ على الاستقرار، يجب إزالة العطل قبل الوصول إلى القيمة الحرجة δcritical. يجب أن تعمل أجهزة الحماية خلال وقت الإزالة tcritical الذي يكون أقل من زمن الفصل الحرج، والذي يتوافق بدوره مع الزّاوية الحرجة δcritical (سويدان، حسان (2013)).
- دراسة حالة
بناءً على الأُسس النّظرية التي نوقشت في الأقسام السّابقة والنّموذج الرّياضي لعناصر نظام القدرة، أُجريت دراسة محاكاة ديناميكية للنّظام المُوضّح في الشّكل (7) باستخدام برنامج NEPLAN. للحصول على بيانات المُولّدات والمُحولات، فيمكن الرّجوع إلى المثال في البرنامج المذكور. يَظهر في الشّكل (7) نتائج جريان الحمولة.
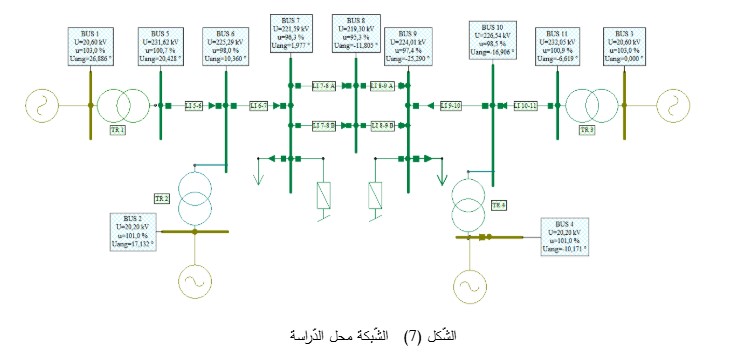
يتكون النّظام من تسع قضبان تجميع وأربعة مُولّدات تزامنية مع محولاتها ومجموعة من خطوط النّقل. يبلغ توتر قضبان تجميع المُولّدات 20 كيلو فولت وتوتر شبكة النّقل 230 كيلو فولت. كما يبلغ إجمالي الطّاقة المُولّدة
سويدان، حسان (2010) دراسة تأثير دارات القصر على الاستقرار العابر في المنظومة الكهربائية السّورية باستخدام برنامج PSS/E. مجلة جامعة دمشق للعلوم الهندسيّة، المجلد السّادس والعشرون، العدد الثاني. ص47- 63
j748.72 + 2735.15 ميغا فولت أمبير وإجمالي الأحمالj199.55 +2651.01 ميغا فولت أمبير. كما أن تردد النّظام يبلغ 60 هرتز. تبلغ مقاومة خط النّقل 0.0529+j0.529 أوم لكل كم.
1.3 دراسة الاستقرار العابر بغياب العنفات الرّيحية
تُمثّل هذه الحالة الوضع التّشغيلي الأساسي لنظام القُدرة قبل ربط العنفات الرّيحية. يؤدي وقوع عطل ثلاثي الأطوار إلى اختلال كبير في توازن الطّاقة، حيث ينخفض التّوتر عند نقطة العطل إلى قيمة قريبة من الصّفر وذلك بإهمال ممانعة العطل. يؤدي هذا الانخفاض في التّوتر إلى تراجع الطّاقة الكهربائية المُولّدة، مما يسبب تسارع المُولدات وازدياد احتمالية فقدان التزامن. يتم تقدير استقرار النّظام عبر حساب زمن الفصل الحرج، وذلك بفرض وقوع عطل ثلاثي الأطوار وإزالته بعد زمن ما مع مراقبة استقرار الدّائر، ثم زيادته تدريجياً وتكرار العملية حتى الوصول إلى أقصى زمن تبقى فيه المُولّدات مستقرة.
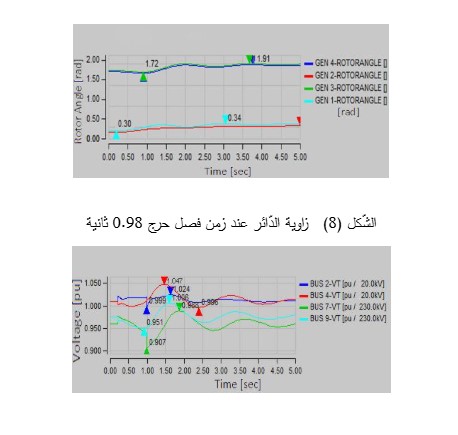
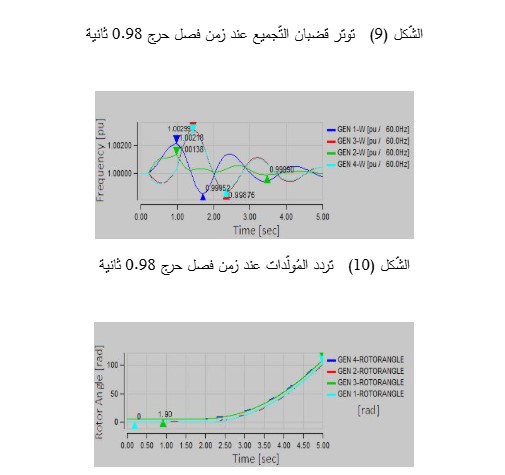
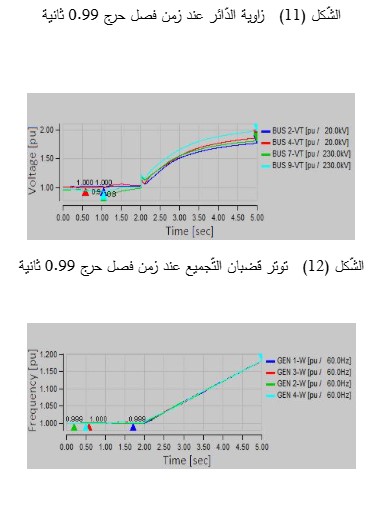
يبلغ زمن الفصل الحرج بعد تطبيق عطل ثلاثي الأطوار على الخط الواصل بين قضيب التّجميع الثّامن والتّاسع 0.98 ثانية. كما هو واضح من الشّكل (8)، فإن هذا العطل لا يؤثر بشكل كبير على استقرار زاوية الدّائر، حيث يبقى الاستقرار الزّاويّ مضموناً. يُوضّح الشّكل (9) بعض توترات قضبان التّجميع. لا يؤثر العطل المذكور على استقرار التّوتر أيضاً. يُوضّح الشّكل (10) سرعة المُولّدات والتي يظهر منها تزامُنها على الرّغم من أنها تتأرجح في نطاقات مختلفة بسبب اختلاف مُحدداتها، لكنها تظل متزامنة وقريبة من السّرعة الاسمية. سيصبح النّظام غير مستقر بعد هذا الزّمن، كما هو موضح في الأشكال (11) و (12) و (13).
الشّكل (13) تردد المُولّدات عند زمن فصل حرج 0.99 ثانية
2.3 دراسة الاستقرار العابر بوجود العنفات الرّيحية
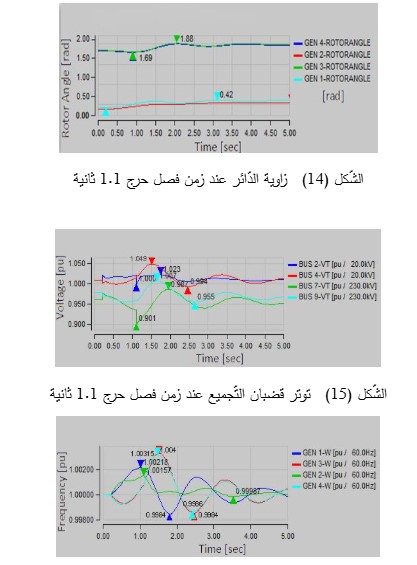
لتوضيح تأثير العنفات الرّيحية على الاستقرار العابر للنّظام الكهربائي، تم ربط المزرعة الرّيحية بقضيب التّجميع التّاسع من خلال مٌحوّلات قدرة على مرحلتين: الأولى 20 / 66 كيلو فولت و66 / 230 كيلو فولت. تبلغ القدرة المُقدّرة للمزرعة الرّيحية 50 ميجاوات. وتتمتع جميع توربينات الرّياح بنفس الخصائص. تمّ تطبيق نفس العطل السّابق بعد ربط المزرعة الرّيحية. ولكن في هذه الحالة زاد زمن الفصل الحرج إلى 1.1 ثانية. بناءً على ذلك، أدّى ربط المزرعة الرّيحية بقضيب التّجميع التّاسع إلى تحسين استقرار النّظام كما هو مُوضّح في الأشكال (14) و(15) و(16). مع الأخذ في الاعتبار أن المولّدات تتأرجح مع بعضها البعض بانحراف طفيف عما كانت عليه سابقاً، وذلك بسبب الاختلاف بين عطالة العنفات الرّيحية وعطالة المُولّدات التّزامنية. يصبح النّظام غير مستقر بعد هذا الزّمن، فعندما يصل زمن الفصل الحرج إلى ما فوق 1.1 ثانية، يضطرب النّظام بنفس الطّريقة السّابقة وذلك بمشاهدة زوايا دوائر المُولّدات وخروج النّظام عن الاستقرار.
الشّكل (16) تردد المولدات عند زمن فصل حرج 1.1 ثانية
3.3 دراسة أثر زيادة استطاعة المزرعة الرّيحية على الاستقرار العابر
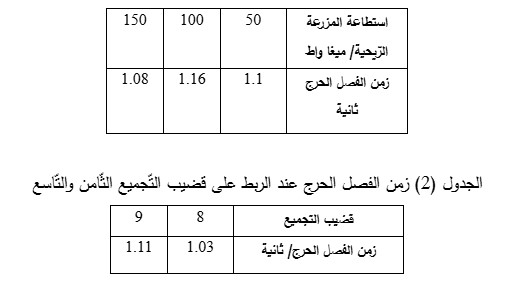
لدراسة تأثير زيادة استطاعة المزرعة الرّيحية على الاستقرار العابر، تمّ زيادة الاستطاعة المُولّدة تدريجياً من 50 ميجاوات واط إلى 150 ميجاوات واط وتمّ تحديد زمن الفصل الحرج لكل حالة. تظهر النّتائج في الجدول (1). ينخفض هامش الاستقرار قليلاً عند زيادة الاستطاعة المُولّدة من المزرعة الرّيحية إلى 150 ميجاوات واط، وهو ما يمكن تفسيره بانخفاض ثابت عطالة النّظام بسبب إضافة المزيد من المُولّدات ذات عُزوم عطالة منخفضة. من ناحية أخرى، لا توفر المُولّدات التّحريضية ثُنائية التّغذية نفس الاستطاعة الرّدّية التي توفرها المُولّدات التّزامنية، كما أنّها لا تستطيع إنتاج نفس استطاعة القصر وبالتّالي، توفر المُولّدات التّزامنية دعماً أقوى لتوتر الشّبكة. لذلك، من الممكن أن تُقلل المُولّدات التّحريضية ثُنائيّة التّغذية من استقرار التّوتر أثناء الحالات الدّيناميكية. في بعض البلدان، يكون كود الشّبكة صارم للغاية، بحيث يجب دمج تلك المُولّدات مع محطات تعويض الاستطاعة الردّية من أجل تحقيق سلوك مُشابه لسلوك المُولّدات التّزامنية.
- دراسة أثر موقع المزرعة الرّيحية على الاستقرار العابر
تمّ دراسة الاستقرار العابر عند ربط المزرعة الرّيحية بقضبان تجميع مختلفة. حيث تحسّن زمن الفصل الحرج فقط عند الربط على قضيب التّجميع الثّامن والتّاسع مقارنةً بالحالة الأساسية كما هو موضّح في الجدول (2).
الجدول (1) زمن الفصل الحرج عند استطاعة توليد مُختلفة من المزرعة الرّيحية
- الخاتمة
تم في هذا العمل دراسة تأثير العنفات الرّيحية من النّوع التّحريضي ثُنائي التّغذية على الاستقرار العابر لنظام القدرة الكهربائي بعد حدوث عطل ثلاثي الأطوار وتمّ التّوصل إلى النّتائج التّالية:
جبور، الياس, الجازي، علي (2008) كتاب الآلات التزامنية، منشورات جامعة دمشق.
- أدّى ربط المزرعة الرّيحية على قضيب التّجميع التّاسع إلى تحسين استقرار النّظام بشكل أفضل مقارنةً بالحالة الّتشغيلية الأساسية.
- حافظ النّظام على استقراره ضمن حدود معينة عند زيادة الاستطاعة المُولّدة من المزرعة الرّيحية.
- توفر بعض المواقع في النّظام الكهربائي هامش استقرار أفضل من غيرها. لذلك، يُوصى بإجراء دراسة ديناميكية للنّظام قبل ربط العنفات الرّيحية وذلك لاختيار أفضل موقع لها ضمن خريطة المواقع الرّيحية المُتاحة.
في الختام، هناك عدة عوامل تؤدي إلى تحسين الاستقرار العابر للمُولّد التّزامني، نذكر منها على سبيل المثال لا الحصر:
- استخدام أنظمة تهييج عالية السّرعة في محطات توليد الطّاقة والتّحكم السّريع بفتحة صمام عنفة البُخار أو الغاز.
- التّقليل من مُفاعلة النّظام عن طريق التّعويض التّسلسلي لبعض خطوط القدرة الكهربائية مع الانتباه إلى تجنب ظاهرة الطّنين.
- استخدام أجهزة الحماية الرّقمية والقواطع الآليّة الحديثة التي تمتاز بسرعة الاستجابة والفصل.
المراجع العربيّة:
- جبور، الياس, الجازي، علي (2008) كتاب الآلات التّزامنية، منشورات جامعة دمشق.
- حمزة، علي, ناجي، كمال, الجابي، سميح (2010) كتاب مدخل إلى الطّاقات المُتجددة. منشورات جامعة دمشق.
- حمزة، علي, زيدان، خالد (2007) كتاب تحليل نظم القدرة الكهربائية. منشورات جامعة دمشق.
- سويدان، حسان (2013) تأثير العنفات الرّيحة ذات السّرعات الثّابتة على الاستقرار العابر للمنظومة الكهربائية السّورية. مجلة جامعة دمشق للعلوم الهندسيّة، المجلد التّاسع والعشرون، العدد الثّاني.
- سويدان، حسان (2010) دراسة تأثير دارات القصر على الاستقرار العابر في المنظومة الكهربائية السّورية باستخدام برنامج PSS/E. مجلة جامعة دمشق للعلوم الهندسيّة، المجلد السّادس والعشرون، العدد الثّاني.
المراجع الأجنبيّة:
- Deutsches wind energy Institute (2001) Wind Turbine Grid Connection and Interaction. Germany.
- Hossain. MJ, Pota, Hemanshu R, Mahmud, Md Apel, Ramos, Rodrigo A (2012)Investigation of the Impacts of Large-Scale Wind Power Penetration on the Angle and Voltage Stability of Power Systems, IEEE system journal.
- Larao, Anaya Olimpo, Jenkins, Nick, Ekanayake, Janaka, Cartwright, Phill, Hughes, Mike (2009) Wind Energy Generation Modelling and Control. John Wiley and Sons, Ltd, Publication, UK.
- Sun, Tao (2004) Power Quality of Grid-Connected Wind Turbines with DFIG and Their Interaction with the Grid. Aalborg University, Denmark.
- www.neplan.ch
مُلحق: أهم المُصطلحات الهندسية المُتعلقة بالبحث:
المولّد التّزامنيSynchronous Generator
المُولّد التّحريضي ثُنائي التّغذية Doubly Fed Induction Generator
الترانزستور ثُنائي القطب ذو البوابة المعزولة Insulated Gate Bipolar Transistor
مُعرّج التّردد Back to Back Converter/ Frequency Converter
استقرار الدّائر Rotor Angle Stability
استقرار الحالة الثّابتة Steady State Stability
الاستقرار العابر Transient Stability
زمن الفصل الحرج Critical Clearing Time
زاوية الفصل الحرجة Critical Clearing Angle
التّعويض التّسلسلي Series Compensation